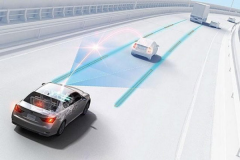
被动驾驶是连年来炙手可热的研发项目,在上市前经由进程仿真测试来评估、提高其平安性将有助于加速研发进程。南京航空航天大学博士生李伟研发的自动驾驶仿真系统,在室外场景街景合成等方面攻破了现有仿真妙技,该成绩颁发在最新一期《科学》杂志子刊《科学·机器人学》上。
据李伟先容,这是一种一致于现有仿真手艺,更加实在切确的踊跃驾驶仿真琐屑(AADS)。它可自动创立传神的路途场景,为积极驾驶车辆供应更为可靠且便宜的试验室模仿门径,可大领域用于锤炼和测试评估被动驾驶细碎的路子打算和决策算法。
现有的仿真零碎在涌现实在的交通流、驾驶员与行人的互动等场景时与着实的状况存在较大的差异。在研究AADS的过程当中,最大的困难异样是如何将路程的真真相况发展仿真合成。李伟及研讨团队用视频和照片来模仿的确世界的旅程和动作,这种数据驱动的办法供给了一个加倍理论与有益的交通仿真模子。
“我们这个体系其实就是在弥补与现实情况的差异,当时咱们的钻研理应是最濒临实在的。”李伟向记者批注道。(张晔 吕汶倩 刘天助)

03-22 来源:未知
03-27 来源:未知
03-22 来源:未知
03-23 来源:未知
03-26 来源:未知
04-03 来源:未知
03-18 来源:未知
03-20 来源:未知
04-16 来源:未知

04-21 来源:未知